
Presently a day’s Robotics is essential for the present correspondence and correspondence is important for headway of innovation, so we chose to deal with ROBOTICS field, and plan something which will make human existence the present perspective. There are various sorts of versatile robots which can be partitioned into a few classifications comprises of wheeled robot, creeping robot and legged robot. This undertaking manages a wheeled independent ROBOT. It is the piece of Automation; Robot has adequate insight to cover the most extreme region. This robot utilizes infrared sensor to recognize the impediment in the middle of the way and afterward stay away from them to finish its goal. The IR transmitter persistently produce an Infrared sign of 38KHz, when a deterrent comes in the way the infrared sign reflected back from the item and is gotten by the IR sensor TSOP1738 and afterward create a positive high sign with the assistance of the recipient circuit that is there is an obstruction in the way. In such a manner the robot can distinguish hindrances of given space and ready to keep away from deterrents coming in the middle of the way of ROBOT with the assistance microcontroller board and complete its excursion. The fundamental saying of planning such kind of Robot or the innovation is that this innovation can be utilized in the present exceptionally quick transportation to stay away from the mishap for the most part occur in blocked or the Metro Politian Areas by applying crisis break. Assuming that we utilize this innovation in the vehicle or any vehicle, it will naturally detect the snags then it will agree with a particular position to the accessible free space. A snag might be a living things or any article. Independent Intelligent Robots will be robots that can perform wanted errands in unstructured conditions without persistent human direction. Along these lines by involving this innovation in vehicles we make the drive safe.
Robot predominantly comprises of two sorts of plans
Mechanical plan
Circuit plan.
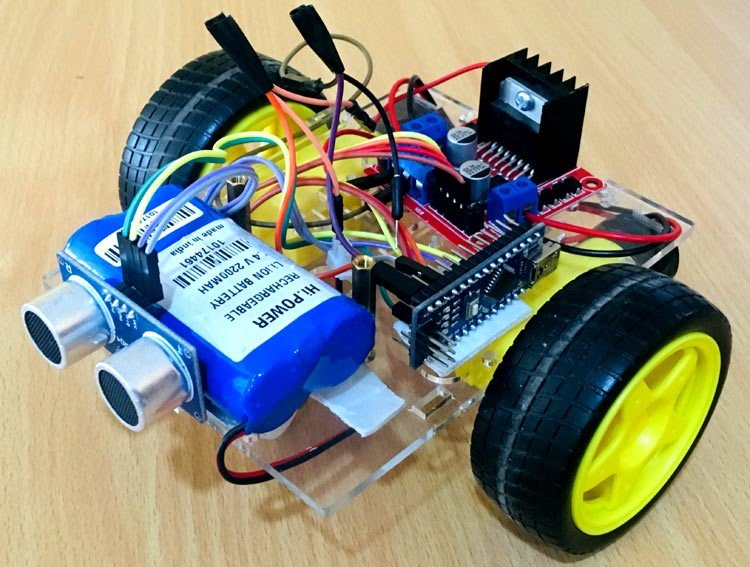
MECHANICAL DESIGN: This incorporates the equipment plan of the robot that is engine &wheel arrangement, body arrangement. Robot www.Roblox.con/redeem utilizes two Robotics gear engine and wheel for the development, which will assist it with pushing ahead, left or right. Robot utilizes two engine and wheel in the rear and one freewheeling ball is put at the front which assists it with liberating development. The sensor are set so that they can cover the greatest region before the robot and can be proficient to distinguish an obstruction either deterrent is little or enormous.
CIRCUIT DESIGN: It is primarily comprises of two sections
- Sensor part
- Control board
Sensor part: The sensors utilized in this robot are Infrared sensor, comprising two section infrared sign generator and the IR recipient planned in single PCB. There are two sensors are utilized as left side sensor and right side sensor and two sensors are utilized to detect the impediment on left and right side. IR Generator. This is a Mono stable multi – vibrator involving NE555 IC creating Infrared Signal of 38 KHz recurrence for better assurance of the article. By utilizing a variable obstruction we can change the recurrence of the IR signal, locator TSOP1738, gives a high result.
IR Detector: IR identifier circuit is a circuit which gives a low result without IR signal. At the point when some deterrent come in way IR signal reflected back and fall onto the IR identifier. So that snag are recognized.
Control board: Control board is the fundamental driver circuit of the robot. It predominantly contains of the microcontroller of Atmel 89C205I and the engine driver. The Atmel 89C2051 is a low-voltage, superior execution CMOS 8-bit microcontroller with 2K bytes of Flash programmable and erasable read-just memory (PEROM). The gadget is produced utilizing Atmel’s high-thickness non-unstable memory innovation and is viable with the business standard MCS-51 guidance set. By joining an adaptable 8-bit CPU with Flash on a solid chip, the Atmel 89C2051 is a strong microcontroller which gives a profoundly adaptable and practical answer for some implanted control applications. Engine driver L293D, conclude which engine will be moving or stop in as per the approaching sign from the microcontroller AT89C2051.
There are two sensor S1and S2 put at the left and right half of the Robot to detect the impediment. These sensors might be infrared sensors or ultrasonic sensor relying on the application. Sensors sense the item then, at that point, create a sign high or low then, at that point, signal is handled by the microcontroller AT80C2051; Microcontroller is modified to stay away from the obstruction, when it get a sign from sensor then by handling this sign drive the engine driver appropriately, as per the approaching sign of sensors microcontroller conclude either left or right engine ought to move. In such a manner the Robot works.
Programming framework
A short outline of the product work and the framework engineering is displayed in Figure 5 to explain the cyclic stage pivot for Nerf Robot development. From the flowchart, the calling grouping and the connection between the capacities are pictured. The calculation and relating flowchart has been displayed here.
Calculation:
- Begin
- Check either switch (p1.6) is on or off
- in the event that on, go to next step4, in any case pivot at a similar advance.
- Instate the information port (P3) and yield port (P1).
- Set the piece of port pin 1.0 and pin1.1
- Peruse information from port 3.
- Actually look at the piece on p3.0
- Assuming piece is available move left engines in Forward course and stop the right engine, else go to subsequent stage 9
- Really look at the piece in p3.2
- In the event that piece is available on pin p3.2, move right engine in forward bearing until we get high sign on pin p3.2 & stop left engine.
- Again go to stage 6.
RESULT:
WORKING OF ROBOT As the robot is turned ON, first it will check either start signal is gotten or not, while perhaps not then the program counter won’t go to the following location it will stays on a similar location until it get a negative sign. Then, at that point, the robot ceaselessly take a look at any impediment in way, on the off chance that there is no deterrent, robot will go straight. On the off chance that any hindrance will found in left side, the regulator send an order to the engine drive to stop the right engine and move the left engine and only inverse as deterrent viewed as in right side.

